
1 Введение.
Сегодня многие процессы и системы автоматизированы для удобства их использования человеком. Если процесс достаточно стабилен и повторяется изо дня в день без изменений, то достаточно просто сконструировать электронную систему для того, чтобы данный процесс проходил без участия человека.
Я учусь в небольшой школе в поселке Быково, наша школа включает в себя два двухэтажных здания, разделенные одноэтажным коротким переходом. Звонки у нас в школе подаются вручную – человек, который отвечает за это, в определенное время согласно расписанию нажимает копку на первом этаже в холле и система оповещения, распределенная по всей школе, включает сигнал звонка. Но существует проблема – в спортивном зале, который расположен на втором этаже в младшем здании, звонок плохо слышен, так как ближайший динамик расположен в коридоре. Поэтому для того, чтобы устранить неудобства, связанные с этим обстоятельством, возникла идея сконструировать автоматический звонок и установить его в спортивном зале для того, чтобы учителя физической культуры и ученики могли слышать сигнал звонка, а не отслеживать время урока и перемены по часам постоянно. Данную задачу достаточно просто решить с помощью использования логических контроллеров.
Цели
· изучить принципы работы контроллеров в электрических цепях и способы их программирования;
· изготовить модель автоматического школьного звонка, который подает сигнал по специальному расписанию, включающему 7 уроков и перемены;
· изготовить при помощи 3D-принтера пластиковый корпус, который обеспечивает удобство использования модели автоматического звонка.
Техническое задание
· модель должна быть удобной в использовании, простой и понятной;
· модель должна иметь возможность подачи звонков по двум расписаниям – 40 минут и 45 минут без дополнительного перепрограммирования;
· модель может иметь разные источники тока – как подключение к сети, так и питание с помощью батареек.
Задачи
· изучить принципы работы контроллеров в электрических цепях;
· изучить способы программирования контроллеров и освоить программу, предназначенную для этого;
· составить работающую схему для автоматического школьного звонка, предусматривающую использование микрочасов, контроллера и переключателя на два режима звонков (уроки по 40 и 45 минут);
· спаять детали по выбранной схеме, проверить работоспособность модели;
· запрограммировать контроллер на два режима подачи звонков (уроки по 40 и 45 минут) и проверить работоспособность модели;
· при помощи программы Компас 3D создать 3D-модель коробки с отверстиями, предназначенными для вывода наружу динамика и кнопок управления;
· распечатать данную модель на 3D-принтере;
· осуществить конечную сборку модели и ее тестирование;
· проанализировать плюсы и минусы получившейся модели и собрать информацию об эффективности ее использования.
Объект исследования – использование микроконтроллеров в электрических схемах.
Предмет исследования – конструирование автоматического школьного звонка согласно техническому заданию.
2 Краткий обзор теоретических сведений об использовании контроллеров и методов их программирования в технике.
Контроллер (от англ. сontrol - управлять) это микропроцессорное устройство, позволяющие производить обработку цифровых сигналов в автоматизированных системах и управлять физическими процессами в соответствии с заложенной последовательностью действия (алгоритмом), с использованием информации, получаемой от датчиков (входов) и выводимой на окончательные устройства (выходы, например, светодиод или динамик). Проще говоря, контроллер – это мозг для машины.
Программируемый логический контроллер (далее ПЛК) — это электронное специализированное устройство, работающее в реальном масштабе времени. Оно способно работать длительное время автономно, без серьезного обслуживания и без вмешательства человека. ПЛК, как и ПК (персональный компьютер), состоят из оперативной памяти, процессора, вспомогательного периферийного оборудования. На сегодняшний день любое устройство, способное работать автоматически, имеет в своем составе управляющий контроллер, который определяет логику работы устройства.
Первый в мире ПЛК появился в середине XX века, а на рынке электроники устройство MODICON производства Bedford Associates появилось в 1960-х годах. Modicon 084 представлял собой шкаф с набором соединённых между собой реле и контактов, его память составляла лишь 4 килобайта.
Термин ПЛК ввел Аллен-Брадли в 1971. Вместе с Ричардом Морли он является его изобретателем. Буквально несколько десятилетий назад все логические системы строились на основе электромеханических реле. Если в конструкции используются реле или другие решения с "жесткой" логикой, то машина может выполнять только определенные действия - научить машину другим операциям нельзя без вмешательства в ее техническую часть. Поэтому с изобретением ПЛК, в большинстве сфер реле в логических схемах были вытеснены ПЛК потому, что его работа зависит от программы, которую можно создать и при необходимости изменить. После этого устройство может работать автономно.
ПЛК представляют собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления, имеющее конечное количество входов и выходов, подключенных к ним датчиков, ключей, исполнительных механизмов к объекту управления, и предназначенное для работы в режимах реального времени.
Структура работы ПЛК в общем виде представлена на рисунке 1.

Рисунок 1. Структура работы ПЛК.
Для работы ПЛК необходимы устройства, которые являются входами. Данных устройств может быть несколько. Это могут быть датчики – температуры, времени, давления и прочие, - то есть устройства, способные давать информацию, данные об измерениях физических величин. Затем в самом ПЛК происходит программная обработка – то есть по алгоритму предпринимаются определенные действия – например, может включаться какое-то устройство, подаваться сигнал на контакты, электроприводы, реле и другие исполнительные устройства.
На сегодняшний день для ПЛК пишется код при помощи программы. При помощи этой программы происходит создание логической связи между входными и выходными клеммами. Именно она определяет, на каких выходных клеммах будет присутствовать напряжение при определенных условиях на входных клеммах. Программирование ПЛК очень простое, потому что язык, на котором это делается, очень схож с логикой работы электромагнитных реле. Если инженер-электрик или обычный монтер умеет читать схемы релейных систем, то он без особых трудностей сможет выполнить программирование контроллеров.
После того как будет заложена программа внутрь ПЛК, компьютер отсоединяется и контроллер работает самостоятельно. Все команды, которые ему были заданы на этапе программирования, он сможет выполнять без посторонней помощи.
Существуют ПЛК разного уровня сложности в зависимости от сложности решаемых задач автоматизации. В зависимости от модели, подключение к ним источников сигналов и особенности программирования будут незначительно отличаться. Но суть процедуры настройки остается неизменной. Во всех моделях контроллеров есть клеммы для подключения питания – некоторые нуждаются в переменном напряжении вплоть до 120 В, а другие - в постоянном до 24 В. В корпусе контроллера есть оптический изолятор – простой светодиод. С его помощью происходит связь входной клеммы и общей. При подаче напряжения на ПЛК загорается светодиод – именно по нему можно судить о том, что устройство работает.
Когда ПЛК включается, то уже через мгновение запускается операционная система. Выполнение пользовательской программы циклическое. Цикл работы состоит из четырех фаз:
· Опрос входов;
· Выполнение команд;
· Установка значений для входов;
· Вспомогательные операции.
Первая фаза цикла полностью обеспечивается системным ПО управления ПЛК. Затем управление берет на себя прикладное ПО – созданный оператором алгоритм. По данной программе контроллер будет выполнять то, что от него хотят. По завершению выполнения этих команд работа опять передается системному ПО. Процесс составления управляющей прикладной программы ПЛК максимально упрощен – программист не должен задумываться, как управлять аппаратными возможностями. Оператор лишь должен указать, какой сигнал будет на входе и как нужно на него реагировать на выходе.
Основное преимущество ПЛК является в том, что один маленький механизм может заменить огромное количество электромеханических реле. С использованием ПЛК можно уменьшить время сканирования, сделать компактными системы ввода/вывода, и подключить нетрадиционные устройства автоматики непосредственно к контроллеру или объединять разное оборудование в единую систему управления. На одном контроллере можно реализовать схему, эквивалентную тысячам электромеханических реле. Причем, в отличие от релейного оборудования, выходной сигнал может использоваться столько раз, сколько требуется для автоматизации. При этом надежность работы схемы не зависит от ее сложности.
3 Краткий обзор теоретических сведений об использовании 3D-моделирования и программы Компас3D, предназначенной для создания 3D-моделей в технике.
Название 3D является сокращением английского 3-dimensional, что дословно переводится как «три измерения». С некоторых пор 3D-моделирование прочно вошло в повседневную жизнь, частично или полностью перестроив некоторые виды технического творчества. Невозможно представить какую-либо значимую сферу производства, в которой на этапе конструирования не применяют объемную графику. Разработка любого объекта становится доступнее при трехмерном представлении каждого элемента, значимой детали. На каждом этапе создания продукта, будь это несложный механизм или ракетный двигатель, ориентируются на многогранный макет. Можно выделить три крупные отрасли, которые сегодня невозможно представить без применения трехмерных моделей. Это:
· Индустрия развлечений
· Медицина (хирургия)
· Промышленность
3D-моделирование первоначально стало широко применяться при создании вымышленных персонажей для фильмов, анимации и 90% всех компьютерных игр. Все виртуальные миры и персонажи созданы с помощью одного и того же принципа — полигонального моделирования. Полигонами называются обыкновенные геометрические фигуры с тремя или четырьмя гранями, которые соединяются под разными углами в один объект. Чтобы он пришел в движение или слился с другими похожими фигурами в объемную модель, необходимо менять параметры у составляющих – вытягивать, перемещать, вращать. Чем меньше площадь каждого отдельного куска, тем больше их общее количество, а значит, выше точность изображения. В таких случаях принято говорить о качестве графики.
То есть 3D-моделирование было виртуальным до момента изобретения 3D-печати. Сейчас, если полигональная модель выполнена в виде замкнутого объема, как например, те же скульптуры, то благодаря современной технологии 3D-печати они могут быть воплощены в жизнь.
Воплощенный в жизнь результат томографии может стать основой для создания импланта, например, зуба, который будет идеально подходить по размерам пациенту. В более сложном варианте технология помогает смоделировать протез конечности, слуховой аппарат, вены, нервы и даже искусственный сердечный клапан. Активно развивается биопечать – в ней вместо пластика используются живые человеческие клетки.
Главными пользователями промышленного моделирования являются инженеры, электрики, строители, работники дорожных служб – специалисты технической направленности. Их инструмент – это твердотельные или полые конструкции, обладающие математически точными параметрами, расчетными данными и реальной направленностью на работу. Поэтому, особенно важным для этой категории пользователей является не внешний вид модели, а его функциональность.
Термин 3D-печать имеет несколько синонимов, один из которых достаточно кратко и точно характеризует сущность процесса – «аддитивное производство», то есть производство за счет добавления материала. Термин был придуман не случайно, ибо в этом и состоит основное отличие множества технологий 3D-печати от привычных методов промышленного производства, получивших в свою очередь название «субтрактивных технологий», то есть «отнимающих». Если при фрезеровке, шлифовке, резке и прочих схожих процедурах лишний материал удаляется с заготовки, то в случае с аддитивным производством материал постепенно добавляется до получения цельной модели.
Для того чтобы технология классифицировалась как «3D-печать», необходимо построение конечного продукта из сырья, а не заготовок, а формирование объектов должно быть произвольным – то есть без использования форм. Последнее означает, что аддитивное производство требует программной составляющей. Грубо говоря, аддитивное производство требует управления с помощью компьютеров, чтобы форму конечных изделий можно было определять за счет построения цифровых моделей. Именно этот фактор и задержал широкое распространение 3D-печати до того момента, когда числовое программное управление и 3D-проектирование стали общедоступными и высокопроизводительными.
В качестве основных технологий 3D-печати можно выделить:
· Экструзионная печать. В основе этого метода лежит выдавливание (экструзия) расходного материала с последовательным формированием готового изделия. Как правило, расходные материалы состоят из термопластиков, либо композитных материалов на их основе.
· Плавка, спекание или склеивание. Этот подход основывается на соединении порошкового материала в единое целое. Подобные принтеры наносят на рабочую платформу тонкие слои порошка, которые затем выборочно склеиваются связующим материалом или спекаются (плавятся) с помощью лазера.
· Стереолитография. Данный тип принтеров использует специальные жидкие материалы, называемые «фотополимерными смолами», которые способны затвердевать под воздействием света. Слой смолы, покрывающий платформу, соответствует одному слою цифровой модели. Затем тонкий слой смолы обрабатывается лазерным лучом, затвердевая в точках соприкосновения. По окончании засветки платформа вместе с готовым слоем погружаются на толщину следующего слоя, и засветка производится вновь.
· Ламинирование. Некоторые 3D-принтеры выстраивают модели, используя листовые материалы – бумагу, фольгу, пластиковую пленку. Слои материала наклеиваются друг на друга и обрезаются по контурам цифровой модели с помощью лазера или лезвия. Такие установки хорошо подходят для макетирования и могут использовать очень дешевые расходные материалы, включая обычную офисную бумагу.
Экструзионная печать FDM – пожалуй, наиболее простой и доступный метод трехмерного построения, что и обуславливает его высокую популярность. FDM-принтеры предназначены для печати термопластиками, которые обычно поставляются в виде тонких нитей, намотанных на катушки. Одним из наиболее популярных материалов является «PLA-пластик». Этот материал изготавливается из кукурузы или сахарного тростника, что обуславливает его нетоксичность и экологичность, но делает его относительно недолговечным. ABS-пластик, наоборот, очень долговечен и износоустойчив, хотя и восприимчив к прямому солнечному свету и может выделять небольшие объемы вредных испарений при нагревании. Из этого материала производятся многие пластиковые предметы, которыми мы пользуемся на повседневной основе: корпуса бытовых устройств, сантехника, пластиковые карты, игрушки и т.д.
Для создания 3D-моделей и их передачи для печати можно использовать различные программы. Мною был использован КОМПАС-3D v17 Home позволяет:
· создавать модели;
· создавать чертежи;
· собирать сборки из отдельных деталей с помощью сопряжений, а также анимировать их;
· параметризовать модели и чертежи;
· создавать и редактировать файлы обменных форматов данных DXF, DWG, Step, Sat, IGES;
· создавать и редактировать файлы с фасетным форматом STL.
4 Создание электрической схемы
автоматического школьного звонка.
Детали для создания электрической схемы, а также консультации при конструировании схемы и программировании логического контроллера были любезно предоставлены детским инженерным клубом Мегавольт, г. Жуковский (https://www.megavoltkids.com). В связи с этим хотелось бы выразить большое спасибо этому клубу и лично Маркову Сергею Геннадьевичу за помощь в создании проекта.
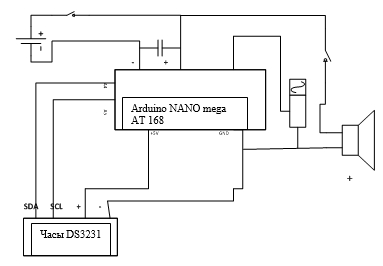
Для того чтобы создать эффективную схему электрического звонка, были подобраны следующие детали:
· контроллер ARDUINO NANO AT 168 mega;
· микрочасы DS 3231;
· пьезодинамик SFM-27-1;
· преобразователь напряжения LM2596;
· электромагнитное реле SRD-05МВС-SL-С;
· конденсатор 10V 1000 µF.
Также были использованы соединительные провода и адаптер на 12V для возможности подключения к сети 220V. Для включения схемы и переключения режимов звонков (40 минут и 45 минут) были использованы два клавишных выключателя
|
Рисунок 2. Контроллер ARDUINO NANO AT 128 mega. |
Рисунок 3. Микрочасы DS 3231. |
|
|
|


|
Рисунок 4. Пьезодинамик SFM-27-1. |
Рисунок 5. Преобразователь напряжения LM2596. |
|
|
|


Необходимость применения деталей:
· контроллер применяется для возможности программирования схемы и включения сигнала (через пьезодинамик) в определенное время;
· микрочасы необходимы для того, чтобы контроллер мог сверяться с заданным параметрами времени;
· пьезодинамик отвечает за подачу сигнала звонка;
· микротрансформатор необходим для того, чтобы контроллер не перегревался от слишком большого напряжения;
· электромагнитное реле контролирует пьезодинамик, так как он использует слишком большое напряжение для того, чтобы включаться непосредственно контроллером;
· конденсатор необходим для создания запаса энергии для стабилизации работы контроллера.
Схема подключения элементов представлена на схеме 1.
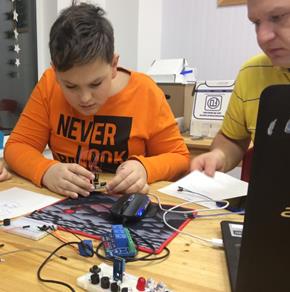
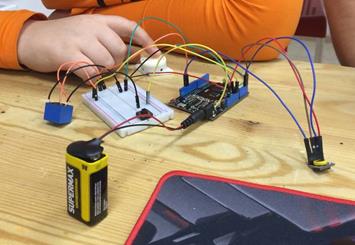
Фотографии собранной схемы представлены на рисунках 6 и 7.
Схема 1. Схема подключения элементов в электрической схеме автоматического звонка.
|
Рисунок 6. Фотография сборки прототипа схемы. |
Рисунок 7. Фотография прототипа схемы. |
|
|
|
При первоначальной сборке были выявлены недостатки электрической схемы, которые пришлось устранять, для того, чтобы добиться ее работоспособности. При этом в схему были включены дополнительные детали:
· звук пьезодинамика был очень тихий, для усиления звука необходимо было увеличить напряжение, поэтому в схему добавили электромагнитное реле;
· первый контроллер перегрелся и вышел из строя, потому что на него было подано слишком большое напряжение, поэтому в схему был добавлен преобразователь напряжения;
· для более стабильной работы контроллера был применен конденсатор;
· для подключения сетевого адаптера понадобилось применение специального разъема.
5 Программирование логического контроллера в автоматическом электрическом звонке.
После того, как собранная схема показала свою работоспособность и была спаяна, контроллер был подключен и запрограммирован. Для программирования логического контроллера была использована программа FL Prog и визуальный язык FBD (язык функциональных блоков).
Сначала мы делали привязку к будням, потом отказались от этого, так как у нас в школе бывают уроки в субботу, а праздничные дни могут быть перенесены на другие числа и каждый год праздничные числа могут выпадать на разные дни недели.
Для программирования мы использовали встроенные блоки из библиотеки FL PROG «БУДИЛЬНИК» и «ТАБЛИЦА СОСТОЯНИЙ». В каждый «БУДИЛЬНИК» мы вписали время и подписали его. «ТАБЛИЦУ СОСТОЯНИЙ» мы использовали для того, чтобы включать РАЗНЫЕ звонки НА УРОК и НА ПЕРЕМЕНУ.
Для считывания информации с часов мы использовали встроенные блоки из библиотеки FL PROG «ЧАСЫ РЕАЛЬНОГО ВРЕМЕНИ».
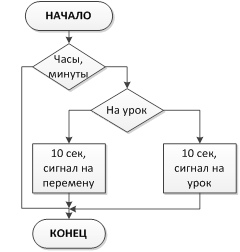
Расписание звонков, которое заложено в программе, представлено в таблице 1. Блок-схема рабочей программы представлена на схеме 2.
Часть программы представлена в виде фотографии на рисунках 8 и 9
Таблица 1. Расписание звонков на 40 и на 45 минут.
|
Расписание звонков для уроков по 40 минут |
Расписание звонков для уроков по 45 минут |
||
|
8.30 – 9.10 |
1-й урок |
8.30 – 9.15 |
1-й урок |
|
9.20 – 10.00 |
2-й урок |
9.25 – 10.10 |
2-й урок |
|
10.15 – 10.55 |
3-й урок |
10.25 – 11.10 |
3-й урок |
|
11.05 – 11.45 |
4-й урок |
11.20 – 12.05 |
4-й урок |
|
12.05 – 12.45 |
5-й урок |
12.25 – 13.10 |
5-й урок |
|
12.55 – 13.35 |
6-й урок |
13.20 – 14.05 |
6-й урок |
|
13.45 – 14.25 |
7-й урок |
14.15 – 14.55 |
7-й урок |
Схема 2. Блок-схема циклической работы программы подачи звонков для логического контроллера.
|
Рисунок 8. Часть программы – так, как она выглядит на экране компьютера, визуальный язык. |
Рисунок 9. Часть программы – так, как она выглядит на экране компьютера, код программы в виде текста. |
|
|
|


6 Изготовление 3D-модели корпуса и окончательная сборка автоматического электрического звонка.
Для удобства использования автоматического звонка, появилось техническое решение – заключить электрическую схему в пластиковый корпус. Для того чтобы изготовить такой корпус, я воспользовался методом 3D-печати на 3D-принтере модели Wanhao Duplicator i3 Desktop 3D printer (фотография представлена на рис. 10.)
Рисунок 10. 3D-принтер, модель Wanhao Duplicator i3 Desktop 3D printer.

Для создания чертежа я применил программу «КОМПАС 3D». При помощи линейки и штангенциркуля я измерил размеры пьезодинамика и кнопочных выключателей. Линейные размеры корпуса были произвольно взяты исходя из удобства использования. Крышка была задана отдельно с учетом линейных размеров корпуса и с выступом для удобства открывания. Фотографии чертежей представлены на рисунках 11 и 12.
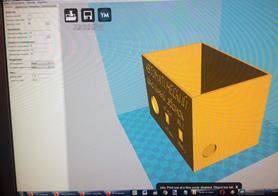
Затем выполненная в чертежах 3D-модель были переведена в формат STL для печати на 3D-принтере. Фотография модели в формате STL представлены на рисунках 13 и 14.
Для печати корпуса применялся пластик PLA. Печать корпуса и крышки заняла более 24 часов 35 минут.
|
Рисунок 11. Чертеж 3D-модели корпуса автоматического звонка в программе КОМПАС 3D. |
Рисунок 12. Чертеж 3D-модели крышки для корпуса автоматического звонка в программе КОМПАС 3D. |
|
|
|

|
Рисунок 13. Фотография файла 3D-модели корпуса автоматического звонка в формате STL. |
Рисунок 14. Фотография файла 3D-модели крышки для корпуса автоматического звонка в формате STL. |
|
|
|

7 Тестирование модели в условиях школы.
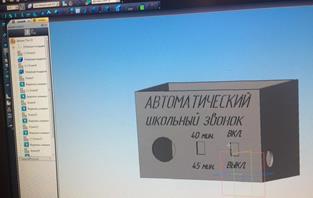
Уже готовую модель звонка я предоставил в школу для того, чтобы в реальных условиях на уроках химии в кабинете 18 и в спортивном зале подтвердить ее работоспособность. Тестирование модели прошло успешно, модель работает исправно. Общий вид модели и вид внутри представлены на рисунках 15 и 16.
|
Рисунок 15. Общий вид модели автоматического звонка в пластиковом корпусе. |
Рисунок 16. Вид модели автоматического звонка изнутри. |
|
|
|


8 Выводы.
В результате моих исследований я получил следующие навыки:
· я изучил принципы работы контроллеров в электрических цепях и способы их программирования, мне удалось изготовить модель автоматического школьного звонка в соответствии с техническим заданием и успешно протестировать его в условиях школы;
· при помощи технологии 3D-печати я изготовил функциональный корпус, который обеспечивает удобство использования модели.
Плюсы данного устройства:
· применение автоматического звонка в спортивном зале устранило необходимость постоянного контроля времени;
· компактность и автономность этого устройства позволяют применять его в также в других местах, в которых требуется контроль времени независимо от общей системы подачи звонков;
· звонок может работать как от сети 220V, так и от аккумуляторов или батареек;
· при любом изменении расписания (изменения времени или количества уроков), автоматический звонок можно легко перепрограмировать;
· надписи на корпусе подсказывают пользователю правильность действий, так что с управлением может справиться любой человек.
Минусы данного устройства:
· динамик в моем устройстве громкий для условий классной работы (кабинет химии 18), но в условиях спортивного зала, например, при проведении командных игр, звук должен быть громче;
· звонок практически постоянно должен быть подключен к источнику тока, так как при отсутствии питания достаточно быстро разряжается аккумулятор автономного питания микрочасов и сбрасывается время; для его восстановления необходимо синхронизировать микрочасы при помощи компьютера;
· практика использования автоматического звонка показала, что желательно применение дисплея, на котором будет отражаться текущий статус устройства – время и надписи «ПЕРЕМЕНА» или «УРОК №__».
9 Заключение.
В нашей стране, как и во многих технически развитых странах мира, наблюдается тенденция к автоматизации различных процессов и систем для устранения рутинности действий и повышения надежности их использования. Многие несложные и рутинные процессы, такие как например контроль времени, требуют от человека повышенной внимательности. А такое обстоятельство, как человеческий фактор неизбежно уменьшает надежность этого процесса. Если процесс достаточно стабилен и повторяется многократно без изменений, то автоматизация его приводит к отличным результатам, что и было продемонстрировано в моей работе.
Основные преимущества использования логических контроллеров для создания различных автоматических устройств перечислить просто:
· контроллеры изготавливаются как самостоятельные детали, что позволяет легко изготавливать различные электрические схемы с ними;
· контроллеры могут совершать большое количество логических операций, в том числе в определенное время и/или определенное количество раз;
· все языки программирования контроллеров достаточны легки в отличие от языков программирования современных компьютеров.
· контроллеры в отличие от компьютеров, могут напрямую использовать сигналы датчиков, в том числе таймеров, и напрямую выводить сигналы на исполнительные механизмы, поэтому могут применяться в большом числе стандартных операций;
· с помощью контроллеров можно сконструировать простейшие устройства, тогда как стандартные электрические цепи для решения таких же задач могут быть очень сложны и ненадежны.
Сконструировав свой автоматический звонок, я избавил от рутинной работы – наблюдения за временем – учителей физической культуры и повысил точность в определении продолжительности уроков. В планах дальнейшей работы сконструировать устройство, которое будет подключено к системе оповещения и будет подавать звонки на урок и с урока по всей школе. При этом отпадет необходимость подавать сигнал звонка вручную, повысится точность в определении продолжительности урока и будет устранен человеческий фактор, случайные ошибки будут «сведены на нет».
Библиографическая ссылка
Платонов А.А. КОНСТРУИРОВАНИЕ И ПРОГРАММИРОВАНИЕ АВТОМАТИЧЕСКОГО ШКОЛЬНОГО ЗВОНКА // Старт в науке. 2020. № 3. ;URL: https://science-start.ru/ru/article/view?id=1891 (дата обращения: 27.07.2026).