
Робот — это кибернетическая система, способная выполнять операции, относящиеся к физической и умственной деятельности человека. Четвероногий робот компактен, мобилен, способен выполнять широкий спектр операций и передвигаться в условиях пересечённой местности. Целью данного проекта является конструирование и создание четвероногого робота «Робокот» на базе Orange Pi, способного самостоятельно передвигаться по команде оператора и передавать видеоизображение. В рамках работы был спроектирован и воссоздан концепт роботизированной самоходной установки с видео фиксацией и стабильным интернет соединением для его управления.
Актуальность. В двадцать первом веке робототехника используется во всех видах промышленности, строительства, быта, авиации, особенно в экстремальных сферах деятельности человечества, таких как военная, космическая и подводная. Не так давно в нашей жизни появились роботы, способные помогать человеку со сложными, рутинными, опасными и даже невозможными операциями. В частности, четвероногий робот может осуществлять проверку опасных зон с риском облучения радиацией, проверять помещения на наличие утечек газа, наблюдать за территорией, переносить относительно нетяжелые вещи, документировать входящие данные.
Цель работы: Сконструировать и создать четвероногого робота «Робокот» на базе Orange Pi, способного самостоятельно передвигаться по команде оператора и передавать видеоизображение. Новизна работы заключается в системе управления: любой человек, имеющий доступ к локальной сети, к которой подключён «Робокот», а также непосредственно к сайту, может взаимодействовать с устройством удаленно.

Изначально стояла задача - создать корпус устройства. Для этого использовались готовые 3D модели проекта “Spot_Micro”, находящиеся в открытом доступе (https://www.thingiverse.com/thing:3445283), которые были частично переделаны под данный проект.
Для печати моделей выбрана программа Cura 3D, т.к. именно она отвечала поставленным задачам печати.
Помимо 3D печати, необходима была аппаратная часть будущего робота.
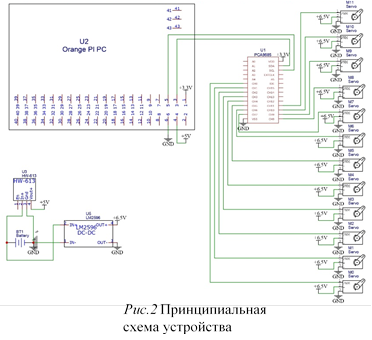
В качестве главной управляющей единицы выбран микрокомпьютер Orange Pi, состоящий всего из одной платы, но по своим характеристикам способный конкурировать с полноценными компьютерами. В роботе Orange Pi управляет серводвигателями, поддерживает работу веб-сервера и организует обратную связь.
Силовой частью, движущей робота, являются 12 сервоприводов MG996R.
Чтобы управлять 12 сервоприводами, понадобилось бы 12 свободных контактов на Orange Pi, поддерживающих ШИМ, поэтому использовался Модуль PCA9685, позволяющий управлять 16-каналами с 12-битным ШИМ по интерфейсу I2C (2 контакта).
Для питания робокота были использованы понижающие DC-DC преобразователи LM2596 и HW-613. Питание микрокомпьютера и серводвигателей осуществляется отдельно друг от друга, т.к. под высокими нагрузками сервоприводов повышаются колебания напряжения, что негативно сказывается на работе программ.
Для передачи видеоизображения была необходима веб-камера с USB подключением, т.к. плата Orange Pi поддерживает USB протокол.
ПО проекта написано для Orange Pi в связке с PCA9685 для подключения сервоприводов. Была найдена и адаптирована общепринятая библиотека (https://github.com/adafruit/Adafruit_Python_PCA9685), описывающая подключения сервопривода к Orange Pi.
За основу берется угол в 90 градусов - это нулевые значения («Робокот» стоит прямо), т.к. сервоприводы имеют только положительный угол. С помощью метода классов были проведены разделения сервоприводов на плечо, колено и саму ногу для выставления конкретного угла.
Также был добавлен параметр скорости set_speeds. Управляющая программа написана на Python 3. Затем писалась веб-оснастка, для которой использовался flask (web-framework) - серверная часть и ASP.net - клиентская часть. В данном случае для удобства всё находится на Orange Pi. С помощью стандартных компонентов были созданы элементы управления данным устройством, а также был сделан вывод видеоизображения по IP-адресу и порту. Для управления данным роботом используется механизм передачи данных через Wi-Fi, на роутере резервируется адрес, по которому пользователь может зайти и управлять данным устройством, также это можно делать с помощью мобильного устройства или любого другого устройства с доступом к локальной сети.

К устройству можно подключиться не только через сайт, но и напрямую к консоли Armbian Linux посредством программы PuTTY. PuTTY позволяет подключиться и управлять удаленным узлом (например, сервером). В PuTTY реализована только клиентская сторона соединения — сторона отображения, в то время как сама работа выполняется на стороне сервера.
Подключение пользователя осуществляется через сайт.
Для вывода видеоизображения используется стандартная программа в Armbian, которая называется motion. С её помощью было настроено видеоотображение на заданный порт и IP-адрес. Далее был сконфигурирован файл motion.conf, в котором были настроены отдельные параметры, такие как framerate, minimum_frame_time и noise_level.
После печати компонентов робота на 3D-принтере была произведена общая сборка устройства, внутрь корпуса были вмонтированы электронные модули, в голову была встроена веб-камера.
После окончательной сборки и написания тестовой программы компоненты изделия были проверены на работоспособность. В результате испытаний были выявлены и исправлены проблемы недостаточной мощности системы питания робота: при большой нагрузке понижающий преобразователь создавал большие помехи, что приводило к неисправной работе устройства и перегреву процессора Orange Pi.
Далее была проведена балансировка устройства. Это было необходимо для более устойчивой ходьбы. Некоторые компоненты были перемещены для смещения центра тяжести и облегчения робота.
Для устойчивой ходьбы были опытным путём подобраны углы сгиба каждой из ног.
В результате опытной доработки устройство стало стабильно работать и устойчиво ходить.

В ходе работы был сконструирован и создан четвероногий робот «Робокот» на базе Orange Pi, способный самостоятельно передвигаться по команде оператора.
В перспективе планируется добавить компьютерное зрение, с возможностью определять людей и препятствия перед собой, корректируя при этом своё движение. Также будет произведена доработка управляющей роботом программы, создано удобное и простое дистанционное управление, введена возможность голосовых команд.
Библиографическая ссылка
Матвейцев А.Л., Еделев А.Ю. СОЗДАНИЕ ЧЕТВЕРОНОГОГО РОБОТА «РОБОКОТ» // Старт в науке. 2021. № 6. ;URL: https://science-start.ru/ru/article/view?id=2133 (дата обращения: 30.05.2026).