
За 2015 год в Китае было продано 68 000 промышленных роботов, а в России – 550. «По плотности автоматизации Россия отстает от стран-лидеров в 69 раз» – пишет Мухамедзянова Далия в своей статье «В робототехнике Россия отстает от развитых стран на 7–10 лет»[24]. В России развиваются малые многопрофильные предприятия, которые, приобретая одного робота, заинтересованы в том, чтобы он выполнял много функций: строил, искал, фиксировал, охранял, перевозил. Многофункциональный, недорогой, простой робот нужен большинству российских малых предприятий, но пока не создан специализированный робот, сделанный с учетом особенностей малого бизнеса в России. Это обусловило выбор темы работы поэтому тема актуальна.
Цель работы: создание модели многофункционального максимально востребованного малым бизнесом универсального гибридного робота-вездехода «ПИОНЕР-01» – простейшего работающего прототипа продукта (MVP).
Задачи:
1. Определить характеристики многофункционального робота для российского малого бизнеса; 2. Проанализировать аналоги роботов для различных отраслей, в которых удачно реализованы характеристики робота, необходимого для российского малого бизнеса; 3. Выбрать конструктивное решение робота; 4. Составить формулу изобретения и создать трехмерную модель робота в варианте применения: сбор вещей; 5. Протестировать модель; 6. Сформулировать задачи для Startup. Объект исследования: промышленные малогабаритные роботы. Предмет исследования: наиболее применимые характеристики промышленных малогабаритных роботов и технические решения, с помощью которых их можно реализовать в одном роботе. Гипотеза. Мы предполагаем, что для малых предприятий более всего необходим проходимый, малогабаритный, недорогой, легкий, мощный, многофункциональный, простой в программировании, управлении и обслуживании, экономичный робот. Возможно, он может быть создан с использованием гибридных технических решений, деревянного корпуса и аппаратной платформы Arduino. Допустим, что УГРВ «ПИОНЕР-01» путем простой модернизации пользователем сможет решать много практических задач, и это обеспечит его эффективность даже при смене профиля деятельности владельца или осуществлении им разных видов деятельности поэтапно.
Методы исследования: теоретические методы – анализ, синтез, сравнение, обобщение, аналогия, моделирование, эксперимент, постановка проблем, исследование гипотез и эмпирические методы – изучение источников информации и результатов деятельности, наблюдение, измерение, тестирование, изучение опыта.
Ход исследования. Мы захотели найти причину редкого использования роботов в малом бизнесе и устранить ее. Для этого мы определили характеристики роботов, нужных малым предприятиям, работающим в разных отраслях, и выявили общие для всех отраслей. Изучили рынок робототехники в разных отраслях и подобрали конструктивное решение, рассмотрев аналоги, в которых удачно реализованы характеристики, необходимые малому бизнесу. Изучены электронные словари, сайты оборудования и соревнований «Кубок РТК», «РобоФест», «РобоКарусель», JuniorSkills по компетенции «Мобильная робототехника» и состязаниях Всероссийской робототехнической олимпиады (ВРО), законодательство РФ о малом бизнесе, использовались книги «Мобильные роботы на базе Arduino» Михаила Момота [5] и «Конструируем роботов на Arduino» Джона Бейктла [1]. С использованием научных методов: сравнение, обобщение, анализ, моделирование и наблюдение, аналогии, мы выбрали нужное решение и спроектировали универсальный гибридный робот-вездеход. Затем была создана его трехмерная модель в варианте применения: сбор вещей. Протестировав ее, мы сформулировали цель и задачи для создания в будущем масштабируемой бизнес-модели по промышленному производству УГРВ «ПИОНЕР» силами команды молодых специалистов (Startup).
Наиболее важные сведения о работе. Робот состоит из деревянного корпуса, в котором расположен контроллер управления приводами, аккумуляторами, питающими драйвера двигателей постоянного тока, приемником радиосигнала для управления. Для увеличения проходимости, он снабжен управляемой платформой с двумя гусеничными лентами, размещенной под основанием робота, поднимаемой и опускаемой с помощью сервоприводов. Вращение каждой гусеницы реализовано отдельным двигателем, управляемым автономно, что позволяет роботу развернуться на месте в сложно-проходимой местности. Для исключения возможности переворота робота предусмотрено колесо-стабилизатор в его передней части, которое также находится на специальном сервоприводе. Сервопривод будет опускать колесо-стабилизатор, оснащенное отдельным двигателем, на поверхность в случае необходимости увеличения проходимости или для исключения переворота платформы. Платформа освещена четырьмя двигателями, что обеспечивает полный привод, маневренность при разворотах, и как итог: большую проходимость робота. Все приводы (6 сервоприводов и 7 двигателей постоянного тока) робота управляются отдельно с 2х пультов оператора. В задней части робота размещен манипулятор с захватом на конце, на корпусе установлен контейнер для сбора вещей. Модернизация робота возможна путем замены конструкции контейнера, датчиков (датчик присутствия, датчик освещенности, датчик наличия газа и т.п), путем установки дополнительного оборудования.
Выводы. Гипотеза подтверждена. Проблемы, требующие дальнейшего изучения обозначены. Они будут решаться силами команды молодых специалистов в ходе создания в будущем масштабируемой бизнес-модели по промышленному производству УГРВ «ПИОНЕР» (Startup).
Новизна. Для большинства малых предприятий необходим робот-вездеход. Предложено гибридное решение, улучшающее проходимость: сочетание двух подвижных, независимых гусениц и 4х высокопроходимых колес, а также колесо-стабилизатор.
1. Постановка задачи и методы ее решения (теоретическая часть)
1.1. Цель и задачи создания роботы. В малом бизнесе в России занято более 18 млн. человек, что составляет 25 % от общего числа занятых в экономике [9]. Основной задачей госполитики в сфере обеспечения экономической безопасности является поддержка высокотехнологичного малого бизнеса (пункт 5 подп.17 раздела III Стратегии экономической безопасности Российской Федерации на период до 2030 года) [10]. Робот – это электронный автономный автоматический механизм, действующий в соответствии с программой для ЭВМ [14]. Созданы сотни эффективных роботов для разных задач. Однако, когда приходим в магазины электротоваров, заходим на сайты производителей роботов, мы не находим роботов, которые можно использовать на небольшом производстве на разных его этапах для разных целей. Критерии отнесения предприятий к малому бизнесу указаны в приложении 7. Для малых предприятий характерны общие проблемы: они платят более высокий процент по кредитам; редко получают доступ к участию в тендерах [11]. Малый бизнес осуществляет проектную деятельность, что подразумевает смену видов работ. Если робот будет подвижным, то должен отвечать самым высоким требованиям по проходимости, чтобы быть эффективным и приносить прибыль системно. Нужен дешевый робот с легко меняющимися съемными модулями. Компания FANUC (Япония) предлагает самый широкий ассортимент роботов в мире [22]. Однако даже на сайте Avito бывшие в употреблении роботы этой фирмы стоят не менее 700 000 рублей [21]. У малого предприятия может не быть в штате квалифицированного специалиста по робототехнике. Нужен простой робот с русской инструкцией с несложным программным обеспечением. Следствием небольшого объема средств и численности может стать отсутствие на предприятии транспорта и больших помещений, поэтому робот должен быть легким и малогабаритным.
Характеристики специализированного робота для российского малого бизнеса должны найти отражение в его названии. Робот должен быть многофункциональным или «для разнообразного применения». Значение слова «универсальный» – с разнообразным назначением, для разнообразного применения[25]. Колесо – дает транспортному средству скорость передвижения, гусеница – максимально высокую проходимость. Мы предположили, что гусенично-колесный ход сможет обеспечить максимально-возможную проходимость роботу. Это свойство робота добавило к его наименованию еще один термин «гибридный». Гибрид (греч. ?βριδικ? – помесь) – это объект, сочетающий в себе свойства других (двух или более) объектов [3]. Повышенная проходимость позволяет назвать робот «вездеходом». Подбирая имя собственное для робота мы остановились на термине «пионер». Пионе?р (от фр. pionnier, pion ) — это первопроходец, зачинатель. Также пионер – это воинская должность или название рядового в инженерных войсках вооружённых сил Российской империи в XVIII—XIX веках и в ряде современных государств (например, ФРГ) [2].
Итак, для российского малого бизнеса более всего необходим проходимый, малогабаритный, недорогой, легкий, мощный, многофункциональный, простой в программировании, управлении и обслуживании, экономичный робот, которого мы будем именовать универсальный гибридный робот вездеход Пионер. Так как создается его первая модификация, то сокращенно название специализированного робота звучит «УГРВ «Пионер-01». Эти характеристики мы используем при выборе направления исследования, методов и средства решения научных задач, определения принципов построения конструктива УГРВ «Пионер-01».
1.2.Анализ аналогов.
1.2.1. Анализ аналогов в нескольких отраслях. Недропользование. Проект Mining-ROX выполняется под руководством Фрайбергской горной академии. Платформа Alexander на основе системы Clearpath Husky имеет два лазерных сканера, систему освещения, стерео камеру и камеру с выходом в интернет (Приложение 1. Анализ аналогов) (фото 1) [8]. Промышленность. Среди промышленных роботов выделяется продукция таких фирм, как Kuka, Fanuc, Universal Robots [7]. Но они в своем абсолютном большинстве создавали стационарных роботов, что далеко не всегда необходимо для малого бизнеса. Однако теперь Kuka будет ориентироваться на малогабаритные подвижные роботы, которые используются в производстве электроники и перевозке грузов на складах[6]. Это говорит в пользу утверждения об отсутствии на рынке небольших и подвижных роботов. Охранная деятельность. Для наблюдения и охраны применяются: MOBILE PLATFORM W/220X ZOOM CAMERA (4X4), 4X4 MOBILE PLATFORM W/DLINK CAMERA, 4X4 MOBILE PLATFORM W/NIGHT VISION CAMERA (фото 2) [26]. Ряд продукции этой фирмы прямо демонстрирует, что можно было бы сделать ее универсального робота со сменной оптикой. Однако, производитель ориентирован на прибыль от продажи каждого робота в отдельности, он не учитывает потребности малого бизнеса. Строительство. Робот для телеинспекции трубопроводов SD-100 (фото 3) может смотреть трубы до 600 мм. Робот SD-100 оснащен фронтальной поворотной камерой с автоуровнем. Класс влагозащиты робота очень высокий. Мы обратили внимание, что цена может меняться в зависимости от курса доллара и составляет 1 749 900 руб. [20]. Даже краткий анализ аналогов показал, что УГРВ Пионер-01 будет востребован на рынке, так как он отвечает характеристикам уже существующего товара, их в себе объединяет и обойдется дешевле.
1.2.2. Анализ аналогов – вездеходов на гусеницах или с гусенично-колесным ходом. 1) Колесно-гусеничный танк. Три года назад мы сделали исследование «История развития и основные виды танков» и еще тогда обратили внимание на статью «Гусеницы или колеса?» [15]. Нас заинтересовали машины, одновременно снабженные самостоятельными колесным и гусеничным движителями: чехословацкий танк КН-50 (рис.1), на чертеже изображен KH-70, следующая модификация за КН-50 (рис.2), английский колесно-гусеничный танк «Виккерс» 1926 г. (рис. 3), шведский колесно-гусеничный танк La-30. (рис. 4). Попытки создать колесно-гусеничный танк не привели к положительным результатам ввиду сложности и уязвимости движителя и системы перемены хода. Усложнялись эксплуатация и ремонт машин. Этот аналог мы не использовали, но сделали вывод, что нам нужна более простая система перемены хода. И при колесная система должна быть основной, а гусеничная – дополнительной, применяться только для увеличения проходимости, когда малоэффективна основная. 2)Tucker Sno-Cat. Нас удивила фотография с зависшим над огромной трещиной во льдах Tucker Sno-Cat 743 (фото 4) американского вездехода Э.М. Такера [4]. Сначала в 1942 году Такер решил натянуть гусеницу на некие понтоны, а уже на них водрузить кузов (фото 5). Такер ездил на нем работу и всесторонне испытал конструкцию. Второй известный робот Такера (423) вмещал уже 4 человека, его передняя ось стояла на управляемых лыжах, которые можно было заменить колесами (фото 6). Четвертая модель «Снежных кошек» (443) (фото 7) опиралась на поверхность четырьмя понтонами. Однако самой эффективной стала 743–я модель, которую мы увидали на фото первой (фото 4). В ходе перехода через Антарктиду, были выявлено, что легкие гусеницы не обеспечивали надежную работу на торосистых участках пути и были практически беспомощны на твердых грунтах. 3) Турбоэлектротрактор ТЭТ-1000 (рис. 5, рис. 6 – фотографии Каптенкова Д. А), разработан в Научном автотракторном институте, предназначенный для рекультивации солончаков. На колесах он двигался «вдоль пахоты», а доехав до места работы опускал гусеницы, поворачивал место тракториста на 90 градусов и катался «поперек». Гусеничные тележки можно снять, и тогда будет просто могучий колесный тягач [12]. Отрицательный момент в этой конструкции в том, что так как не избрана основная и дополнительные системы хода, машина фактически несет на себе оснастку для двух полноценных систем хода, что делает ее тяжелее, сложнее, энергозатратнее. 4) Британский тяжёлый танк периода Первой мировой войны Mark I . Мы решили воспользоваться идеей колеса-стабилизатора, предназначавшегося для увеличения проходимости, тяжёлом танке Mark I [27] (рис. 7), который был разработан в 1916 году и стал первым в истории танком, применённым в боевых действиях.
1.3. Методы и средства решения задачи. В ходе исследования использованы теоретические и эмпирические методы, реализованные в том числе при трехмерном моделировании, которое позволяет убедиться в преимуществах или недостатках того или иного решения, посмотреть, как будет двигаться предполагаемый механизм.
1.3.1. Описание программы Autodesk Fusion 360. Программа Autodesk Fusion 360 представлена у добной в использовании панелью, использованной в процессе создания модели робота [21]. Одна из особенностей – облачный сервис [22]. Исследователь и научный руководитель проекта в режиме реального времени дорабатывали проект. Скриншот некоторых чертежей, подготовленных с использованием Autodesk Fusion 360 размещен в Приложении 2 (рис. 8).
1.3.2. Описание аппаратной платформы Arduino. Выпущенный в 2005 году как скромный инструмент для студентов города Ивреа, Arduino породил международную революцию в сфере международных электронных самоделок [19]. Платформа состоит из аппаратной и программной частей; обе чрезвычайно гибки и просты в использовании. Поддерживаются операционные системы Windows, MacOS X и Linux [16]. «Мозг» Arduino – это микроконтроллер семейства Atmega. Arduino Uno обладает несколькими способами общения с другими Arduino, микроконтроллерами и обычными компьютерами.
1.3.3. Описание материалов, деталей и оборудования. Нестандартным техническим решением стал выбор в качестве основного материала для корпуса деревянной фанеры, как материала более дешевого, легкого и простого в обработке по отношению к алюминию и пластику. При наличии необходимой толщины фанеры, он позволяет создавать в нем отверстия для размещения и оборудования, датчиков с использованием простого оборудования без повышения ломкости материала. Список деталей УГРВ «Пионер-01» изложен в Приложении 3. Для скрепления деталей использовались шуруповерт Bosch GCR14 Professional, отвертки (плоская, фигурная, шестигранная), плоскогубцы, болты, гайки, медные втулки различных диаметров. Изготовленные детали, покрашены акриловой балончиковой краской (эмаль алкидная универсальная) 3-х цветов. Пайка осуществлена с использованием паяльной станции с феном Youyue 8586.
Рама с платформой и обшивка (размер 280 мм х 200 мм), капот, часть крепления манипулятора изготовлены из деревянной фанеры толщиной 6 мм. Контейнер (размер 183 мм х 88 мм), крепление гусеничной платформы (5 деталей) – толщиной 3 мм. Контейнер склеен с использованием клея «Момент Столяр ПВА универсальный», для высыхания использовали 2 струбцины. На одной детали обшивки выгравирована надпись «ПИОНЕР» с использованием лазерной резки. Все фанерные детали изготовлены и использованием лазерного гравировально-режущего станка Халк1290 на DSP, построенного на DSP контроллере (автономной высокоскоростной системе управления) [23]. Его программное обеспечение поддерживает русский язык.
Из пластика PLA с использованием 3D печати изготовлены манипулятор часть его крепежа. Печать осуществлена на Designer PRO 250, на котором возможна печать двумя материалами [18].
2. Описание изобретения. Выводы (практическая часть)
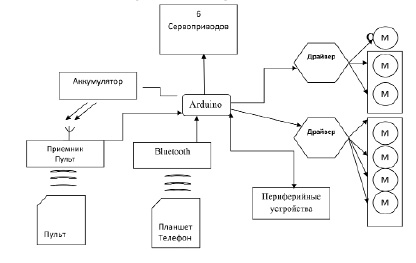
2.1. Формула изобретения. Конструкция УГРВ «ПИОНЕР-01» очень проста, что необходимо для малого бизнеса. Готовое устройство небольшое 280 мм х 200 мм, высота и вес варьируются в зависимости от размещенного на нем оборудования. Робот состоит из деревянного корпуса, в котором расположен контроллер управления приводами, аккумуляторами, питающими драйвера двигателей постоянного тока, приемником радиосигнала для управления. Для увеличения проходимости, он снабжен системой перемена хода – управляемой платформой с двумя гусеничными лентами, управляемыми автономно, размещенной под основанием робота, прикрепленной, поднимаемой и опускаемой с помощью 2 сервоприводов. Вращение каждой гусеницы реализовано отдельным двигателем, управляемым автономно, что позволяет роботу развернуться на месте в сложно-проходимой местности. Устойчивость машины обеспечивается за счет ее собственного веса. Также для исключения возможности переворота робота предусмотрено колесо-стабилизатор в его передней части, которое закреплено на отдельном сервоприводе. Он будет опускать колесо-стабилизатор, оснащенное отдельным двигателем, на поверхность в случае необходимости увеличения проходимости или для исключения переворота платформы. Платформа освещена четырьмя двигателями, на которых прикреплены колеса диаметром 125 мм, что обеспечивает полный привод, маневренность при разворотах, и как итог: большую проходимость робота. В качестве системы управления используются пульт управления и мобильный телефон, колеса управляются с одного устройства, колесо-стабилизатор и гусеницы – с другого. В задней части робота размещен манипулятор с захватом на конце, на корпусе установлен контейнер для сбора вещей. Модернизация робота возможна путем замены конструкции контейнера, датчиков (датчик присутствия, датчик освещенности, датчик наличия газа и т.п), путем установки дополнительного оборудования на платформе рамы, находящейся над колесами. Всего робот имеет 6 сервоприводов и 7 двигателей постоянного тока. Для управления движением платформы и сервоприводами используется платформа Arduino на базе контроллера Atmega 328. Контроллер обрабатывает сигнал с шести канального приёмника радиосигнала. Каждый канал принимает ШИМ (широтно-импупульстный сигнал) и управляет соответствующим приводом. Шесть каналов пульта радиоуправления позволяет управлять 4 основными двигателями, вращением двух гусениц, подъёмом и отпусканием колеса стабилизатора и гусеницы. Питание контроллера и приводов осуществляется Li-ion аккумулятором, для работы с двигателями постоянного тока используется драйвер для усиления управляющих сигналов с контроллера. Для управления манипулятором состоящего из 3-х сервоприводов используется смартфон по беспроводному протоколу Bluetooth. Приложение для смартфона RemoteXY позволяет управлять 3 сервоприводами используя 3 поворотных бегунка в интерфейсе программы. Робототехнические системы с применением сервоприводов являются основным направлением в робототехнике, которое в последнее время получило значительное развитие. Сервоприводы, применяемые в манипуляторе, имеют импульсное управление (от 1 до 2 мс), что обеспечивает высокую точность позиционирования. Также они оснащены железным редуктором, что обеспечивает высокую точность позиционирования и долговечность манипулятора. Все детали трехмерной модели объединены в монолитный блок с электрическими соединениями между ними. В ней предусмотрены необходимые рабочие зазоры между подвижными частями конструкции.
Статичное положение УГРВ «ПИОНЕР-01» изображено на фото 8 и на рис.9, динамичное положение УГРВ «ПИОНЕР-01» – на фото 9 и на рис.10. Общий вид трехмерной модели сверху рис. 11 и снизу рис.12, включены в Приложение 4. Электрическая схема робота является Приложением 5. Ход работ отражен в фоторепортаже в Приложении 6.
2.2. Тестирование УГРВ «ПИОНЕР-01».
Тестирование показало хорошее совмещение колесной базы, гусеничной платформы и колеса-стабилизатора при проверке проходимости. Мощности поворотного мотора сервомоторов достаточно, управляемость для перемещения и захвата объектов высокая. Из-за нахождения гусеничной платформы под рамой просвет между землей и рамой уменьшается, но так как гусеницы работают, то это факт не является критичным, и к недостаткам не относится. Более того, гусенично-колесный ход, дал преимущества: а) центр тяжести расположен снизу (связано это с тем, что большая часть оборудования расположена внизу конструкции и изготовлена из металла), что обеспечивает хорошую устойчивость на поверхности; б) робот имеет хорошую проходимость в момент применения гусениц и колеса-стабилизатора, так как получает большую площадью соприкосновения с земл?й. Приблизительная цена УГРВ «ПИОНЕР-01» составила около 40 000 рублей, и может быть снижена за счет приобретения деталей оптом, она является доступной для приобретения малыми предприятиями РФ. Выявлены следующие проблемы: 1. Необходимо доработать манипулятор, который пока работает в одной плоскости. Увеличить число степеней свободы по отношению к имеющимся трем степеням, плоскостей с целью повысить качество захвата вещей. 2. Два пульта неудобны в управлении, поэтому сразу после тестирования один из пультов заменен на мобильный телефон и размещен прямо на оставшемся пульте. 3. Деревянный корпус легкий, прочный, на него можно поставить дополнительное оборудование, но его качества ухудшаются при длительном воздействии влаги.
2.3. Задачи для Startup.
В ходе создания масштабируемой бизнес-модели по промышленному производству специализированного робота для малого бизнеса модели УГРВ «ПИОНЕР» силами команды молодых специалистов, нужно решить следующие задачи: 1. Усовершенствовать способ управления роботом с одного пульта, вместо пульта и мобильного телефона, что увеличит оперативность подачи сигнала. 2. Изготовить трехмерные модели модулей (узлов) для комплектации УГРВ «ПИОНЕР-01» под конкретные задачи. Например, «модуль ориентации», состоящий из: 1) двух датчиков расстояния, сканирующих препятствия перед собой; 2) камеры, которая позволит управлять роботом оператору и снимать окружающую среду; 3) датчика акселерометра, отслеживающего положение робота относительно поверхности. 3. Написать программы для модулей и с использованием аппаратного комплекса Ардуино, которые можно было бы скачивать в сети «Интернет», обеспечивающие функционирование соответствующего модуля. 4. Использовать более влагостойкий долговечный материал – стеклопластик. Он легко сверлиться, долговечен и неиспользуемые отверстия просто заплавить. Нужно учесть ломкость материала с учетом максимального веса модулей (узлов) для комплектации УГРВ «ПИОНЕР-01» под конкретные задачи. 5. Модернизировать капот УГРВ «ПИОНЕР-01», так чтобы даже высота модулей (узлов) для комплектации УГРВ «ПИОНЕР-01» более высоты корпуса позволяла держать его в ходе движения закрытым.
Заключение
Гипотеза о том, что для малых предприятий более всего необходим проходимый, малогабаритный, недорогой, легкий, мощный, многофункциональный, простой в программировании, управлении и обслуживании, экономичный робот подтверждена. Значимость работы. При серийном выпуске универсальных гибридных роботов-вездеходов серии «ПИОНЕР» отношение к роботам на малых предприятиях, как к предмету роскоши, изменится на отношение к роботу, как к предмету первой необходимости для развития бизнеса.
Предложения по практическому использованию результатов.
УГРВ «ПИОНЕР-01» может использоваться для наблюдения за объектом, передачи данных, перевозки вещей, поиска, строительства малых форм, фиксации характеристик объекта, охраны.
Применим для:
– недропользования (геологоразведка и горное дело);
– строительства (создание малых форм, оценка качества сварных швов и иных параметров строительства);
– сельского хозяйства (наблюдение за животными, растениями);
– спорта (фиксация объема нагрузки, достижений);
– в естественных науках (наблюдение, сбор образцов воздуха и т.п., анализы на наличие газов в воздухе);
– охоты (наблюдение, фиксация, передача информации);
– собирательства (сбор ягод, грибов, орехов, лекарственных растений);
– в быту (уборка, охрана, перенос вещей);
– для доставки туристического снаряжения и навигации через GPS-навигатор;
– в поисковом деле (археология, экспедиции, альпинизм), для природоохраны (регистрация браконьеров возле ловушек, капканов) и многого другого.
УГРВ «ПИОНЕР-01» – ПРОДУКЦИЯ ДВОЙНОГО НАЗНАЧЕНИЯ, применим:
– для помощи в чрезвычайных ситуациях (поиск, наблюдение, доставка вещей);
– для обороны (перевозка вещей, наблюдение, охрана, минирование и разминирование).
Приложение 1
Анализ аналогов

Фото 1. Проект Mining-ROX. Платформа Alexander на системе Clearpath Husky, Германия



Фото 2. Охранная деятельность MOBILE PLATFORM W/220X ZOOM CAMERA (4X4) , 4X4 MOBILE PLATFORM W/DLINK CAMERA, 4X4 MOBILE PLATFORM W/NIGHT VISION CAMERA (по порядку)

Фото 3. Робот для телеинспекции трубопроводов SD-100

Рис. 1. KH-50, Чешский танк
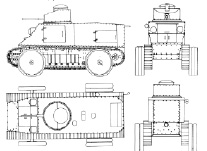
Рис. 2.Чешский танк KH-70

Рис. 3 Английский танк «Виккерс», 1926

Рис. 4. Шведский танк

Фото 4. Tucker Sno-Cat 743

Фото 5. Первый вездеход Э.М.Таркера

Фото 6. Tucker Sno-Kitten 423 …….

Фото 7. Tucker Sno-Kitten 443

Рис. 5. Турбоэлектротрактор ТЭТ-1000

Рис. 6. Турбоэлектротрактор ТЭТ-1000

Рис. 7. Mark I Британский тяжёлый танк периода Первой мировой войны
Приложение 2
Скриншот чертежей УГРВ «ПИОНЕР-01», подготовленных с использованием программы Autodesk Fusion 360
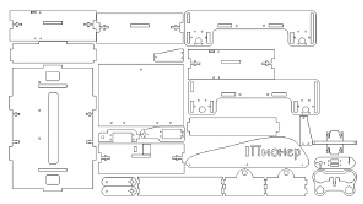
Рис. 8
Приложение 3
Список деталей УГРВ «ПИОНЕР-01»
|
Название |
Колво (шт) Кол-вошт. |
|
Детали, изготовленные в Центре Инновационного Творчества и Робототехники «Фаблаб ТюмГУ» |
|
|
Манипулятор из пластика PLA с использованием 3D печати (включает 2 детали) |
1 |
|
Рама с платформой из фанеры толщиной 6 мм с использованием лазерной резки |
1 |
|
Обшивка из фанеры толщиной 6 мм, на одной детали обшивки выгравирована надпись «ПИОНЕР» с использованием лазерной резки |
2 |
|
Крепление манипулятора включает крепеж из фанеры толщиной 6 мм с использованием лазерной резки и крепеж из пластика PLA с использованием 3D печати |
2 |
|
Капот из фанеры толщиной 6 мм с использованием лазерной резки |
1 |
|
Крепление гусеничной платформы из фанеры толщиной 3мм с использованием лазерной резки (включает 5 деталей) |
1 |
|
Изготовленные детали, покрашены акриловой балончиковой краской (эмаль алкидная универсальная) 3-х цветов |
|
|
Приобретенные детали |
|
|
Аппаратная платформа Arduino на базе микроконтроллера Atmega 328 |
1 |
|
МИКРОКОНТРОЛЛЕРЫ: Драйверы двигателей ШИМ |
2 |
|
Танковая звезда 3818 |
2 |
|
Гусеница 3818 |
2 |
|
Колесо опорное B1 |
2 |
|
Колесо опорное B2 |
2 |
|
Насадка «Танк» 4 мм |
2 |
|
Серводвигатель LD-20MG-20KG-180° |
6 |
|
Гексагональная длинная насадка – 6 мм |
4 |
|
Колесо 85 мм «Универсал» |
1 |
|
Колесо 125 мм «Вездеход» – К |
4 |
|
Гексагональная длинная насадка – 4 мм |
1 |
|
Аккумулятор Li-Po Hubsan 7.4 2700 mAh 10C – H501S-14 |
1 |
|
Аккумулятор nVision LiPo 11.1V 3S 30C 2200 mAh – NVO1810 |
1 |
|
Универсальное зарядное устройство Pulsar BX-07 – BX-07 |
1 |
|
Бортовой тестер-индикатор напряжения 1–8S Lipo – IMAX-BVT |
2 |
|
Петля мебельная 40 мм |
2 |
|
Пульт FlYSKY FS-T6 |
1 |
|
Электродвигатель DС мотор 434 оборотов в секунду 6V(вращение основных колес) |
4 |
|
Электродвигатель с редуктором 100 обор. в мин. 12V(вращение гусениц и колеса-стабилизатора) |
3 |
|
Для управления используется 1 сенсорный мобильный телефон |
Приложение 4
Статичное, динамичное положение УГРВ «ПИОНЕР-01»
Общий вид трехмерной модели сверху и снизу
Статичное положение УГРВ «ПИОНЕР-01»

Фото 8

Рис. 9
Динамичное положение УГРВ «ПИОНЕР-01»

Фото 9

Рис. 10
Общий вид УГРВ «ПИОНЕР-01» сверху и снизу

Рис. 11

Рис. 12
Приложение 5
Электрическая схема УГРВ «ПИОНЕР-01»
Приложение 6
Фоторепортаж хода исследования
1. Моделирование

2. Разработка электросхем

3. Пайка

4. Резка лазером

5. Начало сборки, подгонка деталей

6. Покраска

7. Я и шуруповёрт

8. Клею

9. Скоро всё будет готово!

10. Научный руководитель Валерий Леонидович Сэрпива, инженер-робототехник Центра Инновационного Творчества и Робототехники «Фаблаб ТюмГУ», Сергей Ушивцев и УГРВ Пионер-01

Приложение 7
Критерии отнесения предприятий к малому бизнесу
Критерии отнесения к малому бизнесу определены Федеральным законом «О развитии малого и среднего предпринимательства в РФ»[1]. Субъекты малого и среднего предпринимательства – это хозяйствующие субъекты (юридические лица и индивидуальные предприниматели), отнесенные в соответствии с условиями, установленными этим законом, к малым предприятиям, в том числе к микропредприятиям, и средним предприятиям (ст. 3 ФЗ).
Чтобы считаться малым, средним или микропредприятием в 2018 году, нужно подходить под это определение по трем основным параметрам:
• попадать в рамки лимита по размеру доходов;
• попадать в рамки лимита по численности сотрудников;
• попадать в рамки лимита по доле участия других компаний в уставном капитале.
Приведем условия в виде таблицы[2].
|
Условия |
Среднее предприятие |
Малое предприятие |
Микропредприятие |
|
Доходы |
2 млрд. руб. |
800 млн. руб. |
120 млн. руб. |
|
Численность сотрудников |
101–250 человек |
100 человек |
15 человек |
Еще одно условие. Малыми могут быть только: хозяйственные общества (например, ООО) и партнерства; кооперативы – производственные, сельскохозяйственные, потребительские; фермерские хозяйства; индивидуальные предприниматели. Доля участия других лиц в капитале:
1) Доля участия государственных образований (РФ, субъектов РФ, муниципальных образований), общественных и религиозных организаций и фондов не более 25 % в сумме;
2) Доля участия обычных юридических лиц (в том числе иностранных) не более 49 % в сумме.
3) Доля участия юрлиц, которые сами субъекты малого и среднего предпринимательства, не ограничена.
[1]Федеральный закон от 24.07.2007 N 209-ФЗ (ред. от 27.11.2017) "О развитии малого и среднего предпринимательства в Российской Федерации"// "Российская газета", N 164, 31.07.2007// СПП КонсультантПлюс (дата обращения: 10.01.2018).
[2]Некрасова Наталья. Малые предприятия в 2018 году — какие компании попадают в эту категорию. Источник: http://ppt.ru/malie-predpriyatia(дата обращения: 10.01.2018).
Библиографическая ссылка
Ушивцев С.А. УНИВЕРСАЛЬНЫЙ ГИБРИДНЫЙ РОБОТ-ВЕЗДЕХОД «ПИОНЕР-01» ДЛЯ МАЛОГО БИЗНЕСА // Старт в науке. 2019. № 1-1. ;URL: https://science-start.ru/ru/article/view?id=1349 (дата обращения: 30.06.2026).